| Description | Figure | Moment(s) of inertia |
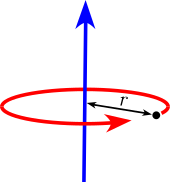
| Point mass M at a distance r from the axis of rotation.
A point mass does not have a moment of inertia around its own axis, but using the parallel axis theorem a moment of inertia around a distant axis of rotation is achieved. |
 |
 |
| Two point masses, m1 and m2, with reduced mass μ and separated by a distance x, about an axis passing through the center of mass of the system and perpendicular to the line joining the two particles. |
 |
 |
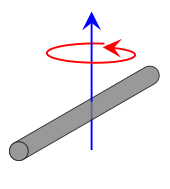
| Thin rod of length L and mass m, perpendicular to the axis of rotation, rotating about its center.
This expression assumes that the rod is an infinitely thin (but rigid) wire. This is a special case of the thin rectangular plate with axis of rotation at the center of the plate, with w = L and h = 0. |
 |
 [1] [1] |
| Thin rod of length L and mass m, perpendicular to the axis of rotation, rotating about one end.
This expression assumes that the rod is an infinitely thin (but rigid) wire. This is also a special case of the thin rectangular plate with axis of rotation at the end of the plate, with h = L and w = 0. |
 |
 [1] [1] |
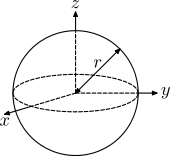
| Thin circular loop of radius r and mass m.
This is a special case of a torus for a = 0 (see below), as well as of a thick-walled cylindrical tube with open ends, with r1 = r2 and h = 0. |
 |

 |
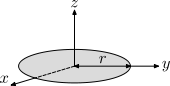
| Thin, solid disk of radius r and mass m.
This is a special case of the solid cylinder, with h = 0. That  is a consequence of the perpendicular axis theorem. is a consequence of the perpendicular axis theorem. |
 |

 |
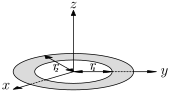
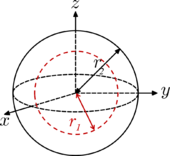
| A uniform annulus (disk with a concentric hole) of mass m, inner radius r1 and outer radius r2 |
 |


|
An annulus with a constant area density  |


|
| Thin cylindrical shell with open ends, of radius r and mass m.
This expression assumes that the shell thickness is negligible. It is a special case of the thick-walled cylindrical tube for r1 = r2.
Also, a point mass m at the end of a rod of length r has this same moment of inertia and the value r is called the radius of gyration. |
 |
 [1] [1] |
| Solid cylinder of radius r, height h and mass m.
This is a special case of the thick-walled cylindrical tube, with r1 = 0. |
 |
[1]
 |
| Thick-walled cylindrical tube with open ends, of inner radius r1, outer radius r2, length h and mass m. |
 |
 [1]
[2]
[1]
[2]
where t = (r2 − r1)/r2 is a normalized thickness ratio;

The above formula is for the xy plane passing through the center of mass, which coincides with the geometric center of the cylinder. If the xy plane is at the base of the cylinder, i.e. offset by  then by the parallel axis theorem the following formula applies: then by the parallel axis theorem the following formula applies:

|
| With a density of ρ and the same geometry |


|
| Regular tetrahedron of side s and mass m with an axis of rotation passing through a tetrahedron's vertex and its center of mass |
 |

 [3] [3]
|
| Regular octahedron of side s and mass m |
 |
 [3] [3]
 [3] [3] |
| Regular dodecahedron of side s and mass m |
|

 (where (where  ) [3] ) [3]
|
| Regular icosahedron of side s and mass m |
|

 [3] [3]
|
| Hollow sphere of radius r and mass m. |
 |
 [1] [1] |
| Solid sphere (ball) of radius r and mass m. |
 |
 [1] [1] |
| Sphere (shell) of radius r2 and mass m, with centered spherical cavity of radius r1.
When the cavity radius r1 = 0, the object is a solid ball (above).
When r1 = r2,  , and the object is a hollow sphere. , and the object is a hollow sphere. |
 |
 [1] [1] |
| Right circular cone with radius r, height h and mass m |
 |
 [4] [4]
About an axis passing through the tip:
 [4] [4]
About an axis passing through the base:

About an axis passing through the center of mass:
 |
| Right circular hollow cone with radius r, height h and mass m |
|
[4]
 [4] [4] |
| Torus with minor radius a, major radius b and mass m. |
 |
About an axis passing through the center and perpendicular to the diameter:  [5] [5]
About a diameter:  [5] [5]
|
| Ellipsoid (solid) of semiaxes a, b, and c with mass m |
 |


 [6] [6] |
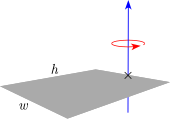
Thin rectangular plate of height h, width w and mass m
(Axis of rotation at the end of the plate) |
 |
 |
Thin rectangular plate of height h, width w and mass m
(Axis of rotation at the center) |
 |
 [1] [1] |
| Thin rectangular plate of mass m, length of side adjacent to side containing axis of rotation is r[lower-alpha 1](Axis of rotation along a side of the plate) |
|
 |
| Solid rectangular cuboid of height h, width w, and depth d, and mass m.[7]
For a similarly oriented cube with sides of length  , ,  |
 |


 |
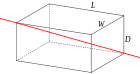
| Solid cuboid of height D, width W, and length L, and mass m, rotating about the longest diagonal.
For a cube with sides ,  . . |
 |
 |
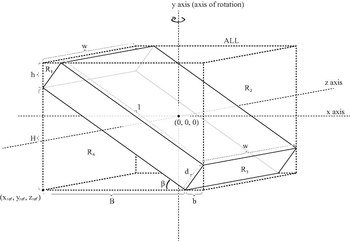
| Tilted solid cuboid of depth d, width w, and length l, and mass m, rotating about the vertical axis (axis y as seen in figure).
For a cube with sides , . |
 |
 [8] [8] |
| Triangle with vertices at the origin and at P and Q, with mass m, rotating about an axis perpendicular to the plane and passing through the origin. |
|
 |
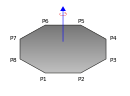
| Plane polygon with vertices P1, P2, P3, ..., PN and mass m uniformly distributed on its interior, rotating about an axis perpendicular to the plane and passing through the origin. |
 |
 |
| Plane regular polygon with n-vertices and mass m uniformly distributed on its interior, rotating about an axis perpendicular to the plane and passing through its barycenter. R is the radius of the circumscribed circle. |
|
 [9] [9] |
| An isosceles triangle of mass M, vertex angle 2β and common-side length L (axis through tip, perpendicular to plane) |
 |
 [9] [9] |
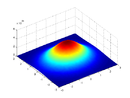
Infinite disk with mass distributed in a Bivariate Gaussian distribution on two axes around the axis of rotation with mass-density as a function of the position vector 

|
 |
 |
 ,
,  ...
...





















































.png)

































 ,
,  ...
...






{kind=link}