
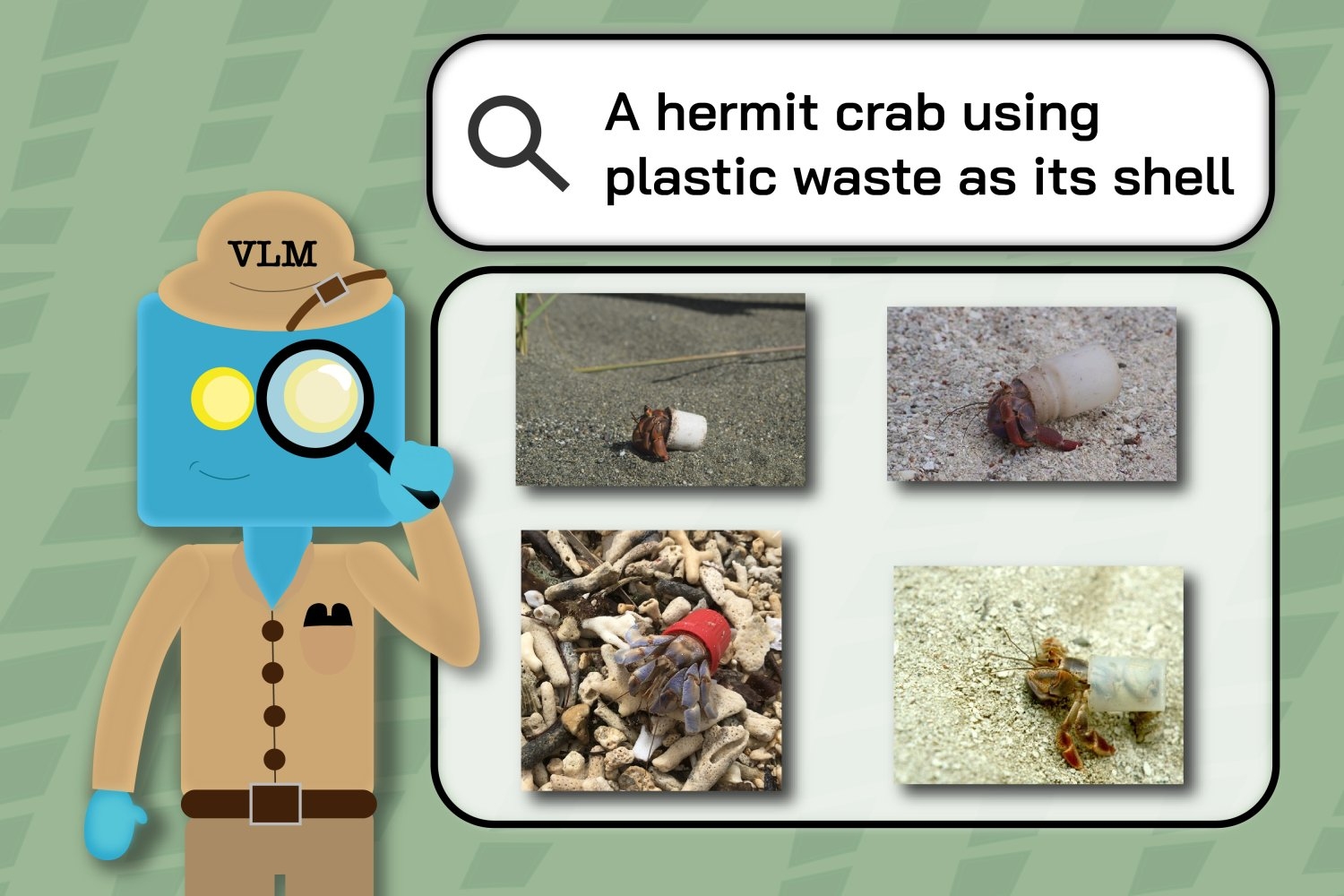
Ecologists find computer vision models’ blind spots in retrieving wildlife images
Biodiversity researchers tested vision systems on how well they could retrieve relevant nature images. More advanced models performed well on simple queries but struggled with more research-specific prompts.
Dec. 20, 2024 • ~9 min
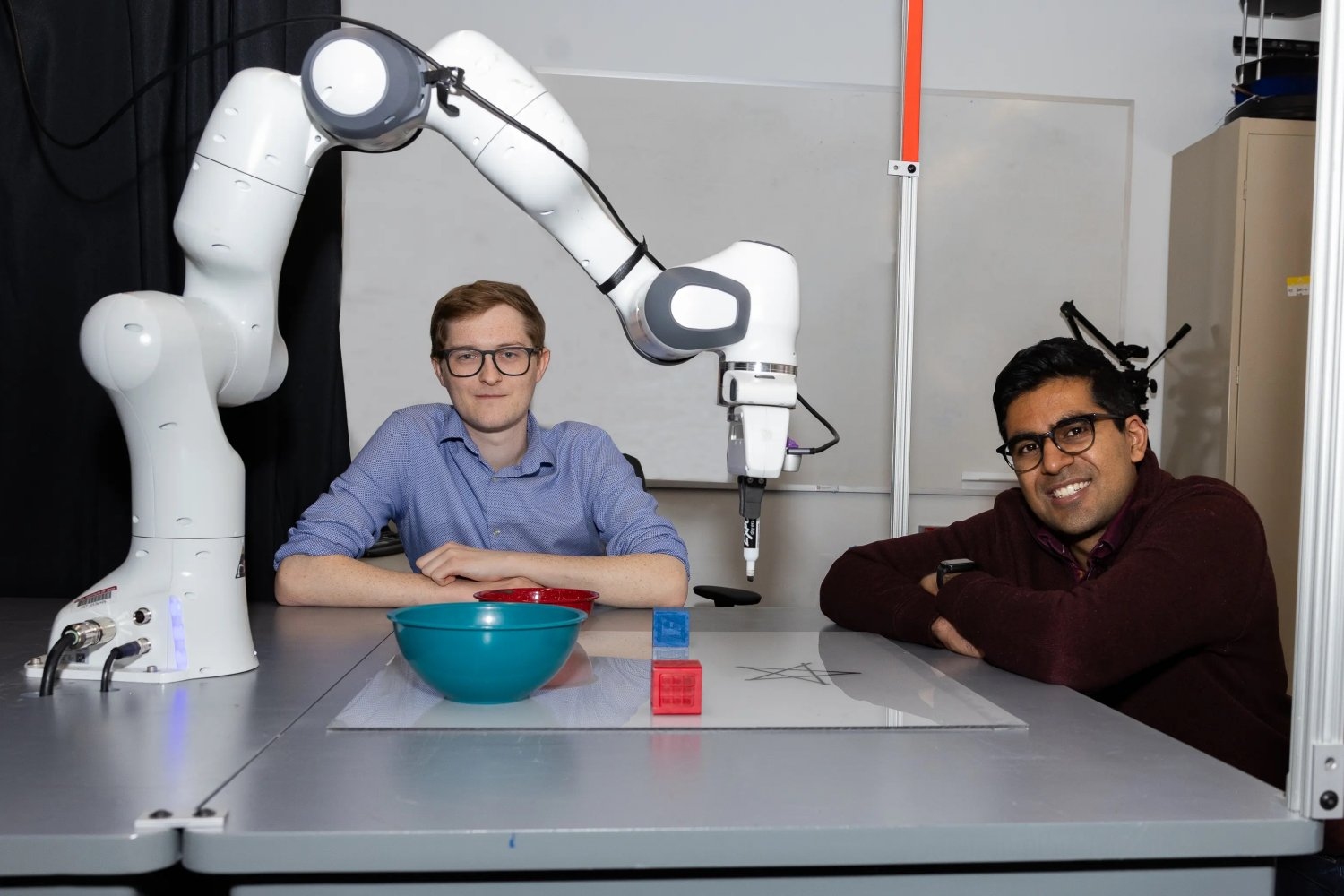
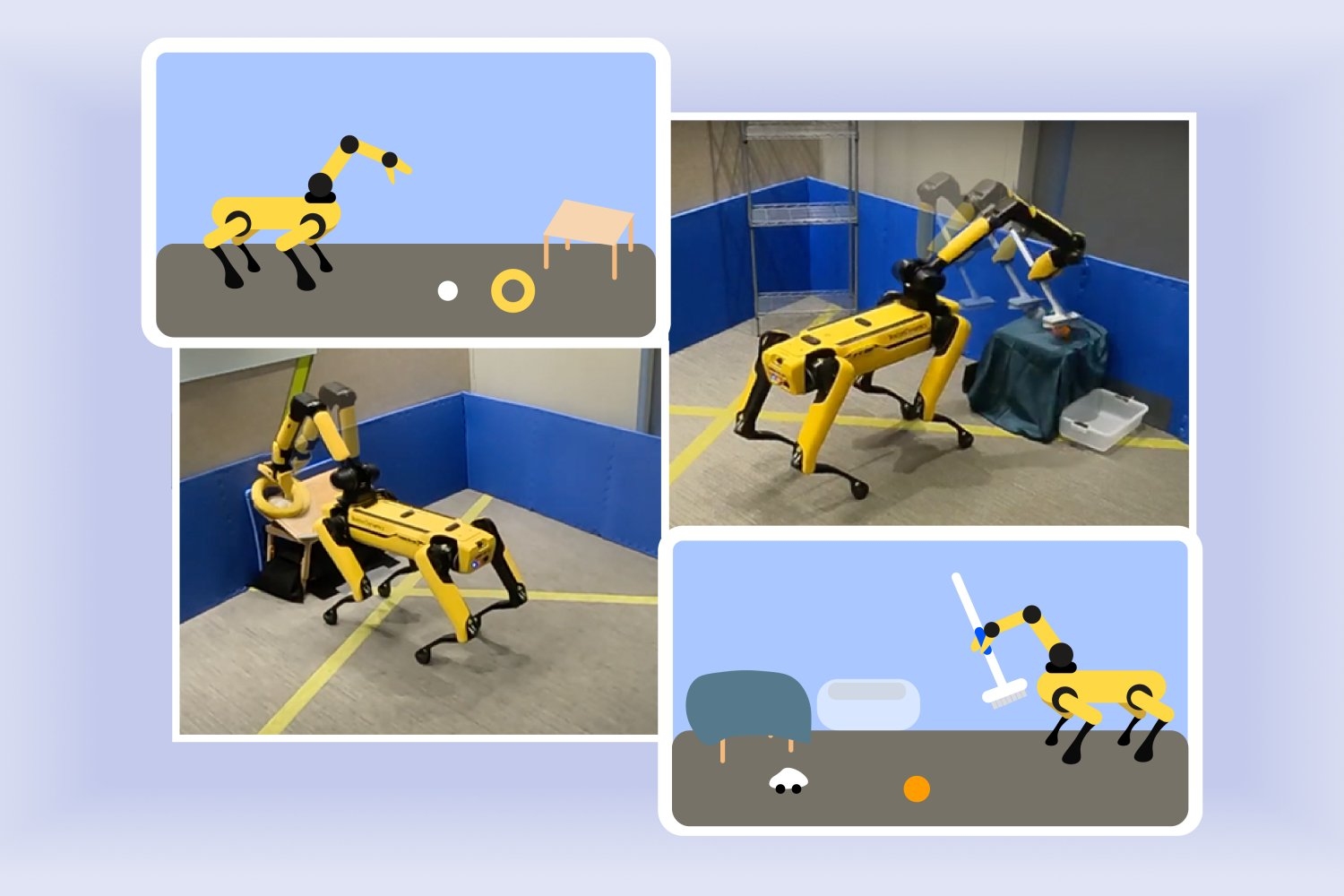
Teaching a robot its limits, to complete open-ended tasks safely
The “PRoC3S” method helps an LLM create a viable action plan by testing each step in a simulation. This strategy could eventually aid in-home robots to complete more ambiguous chore requests.
Dec. 12, 2024 • ~6 min


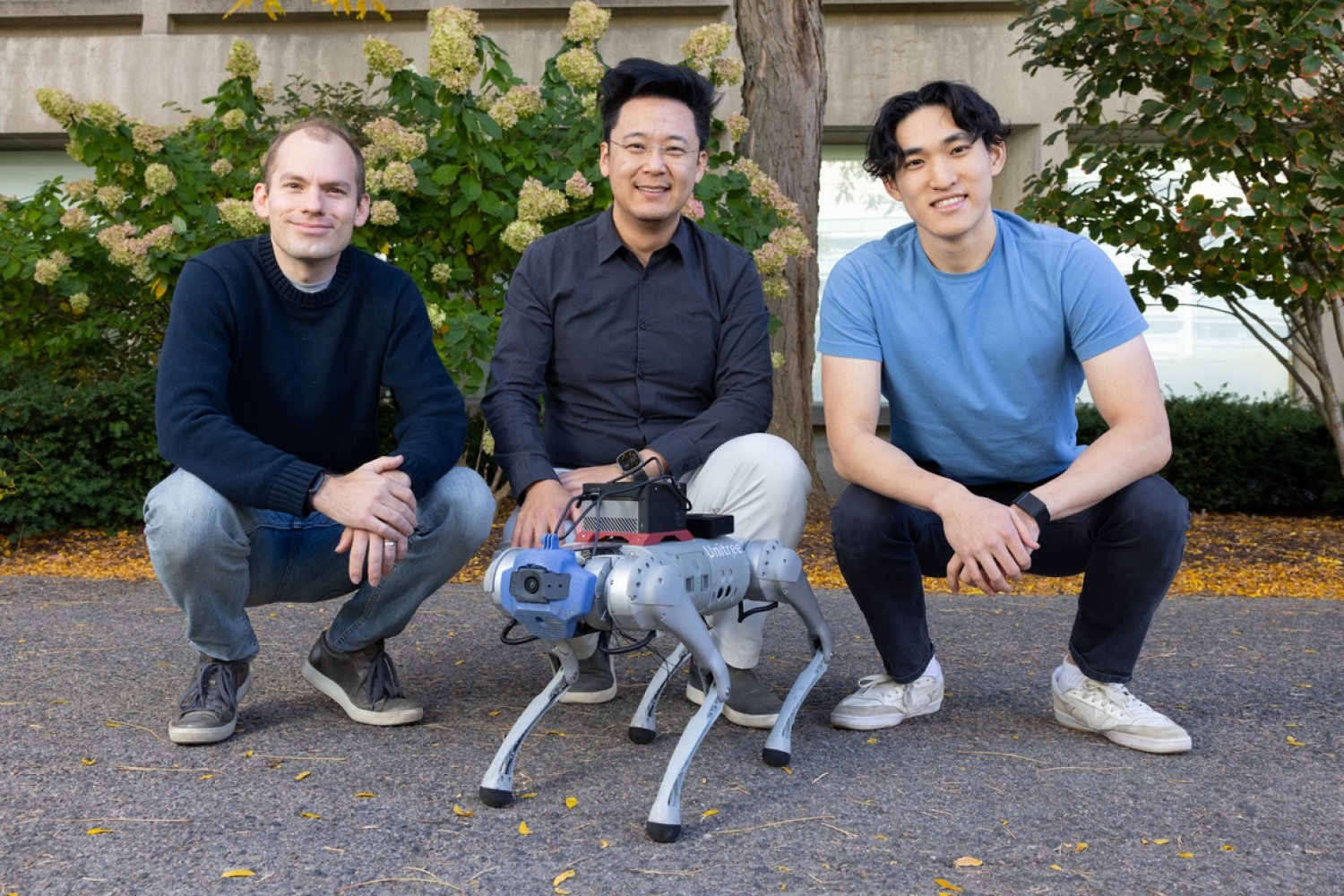
Combining next-token prediction and video diffusion in computer vision and robotics
A new method can train a neural network to sort corrupted data while anticipating next steps. It can make flexible plans for robots, generate high-quality video, and help AI agents navigate digital environments.
Oct. 16, 2024 • ~8 min
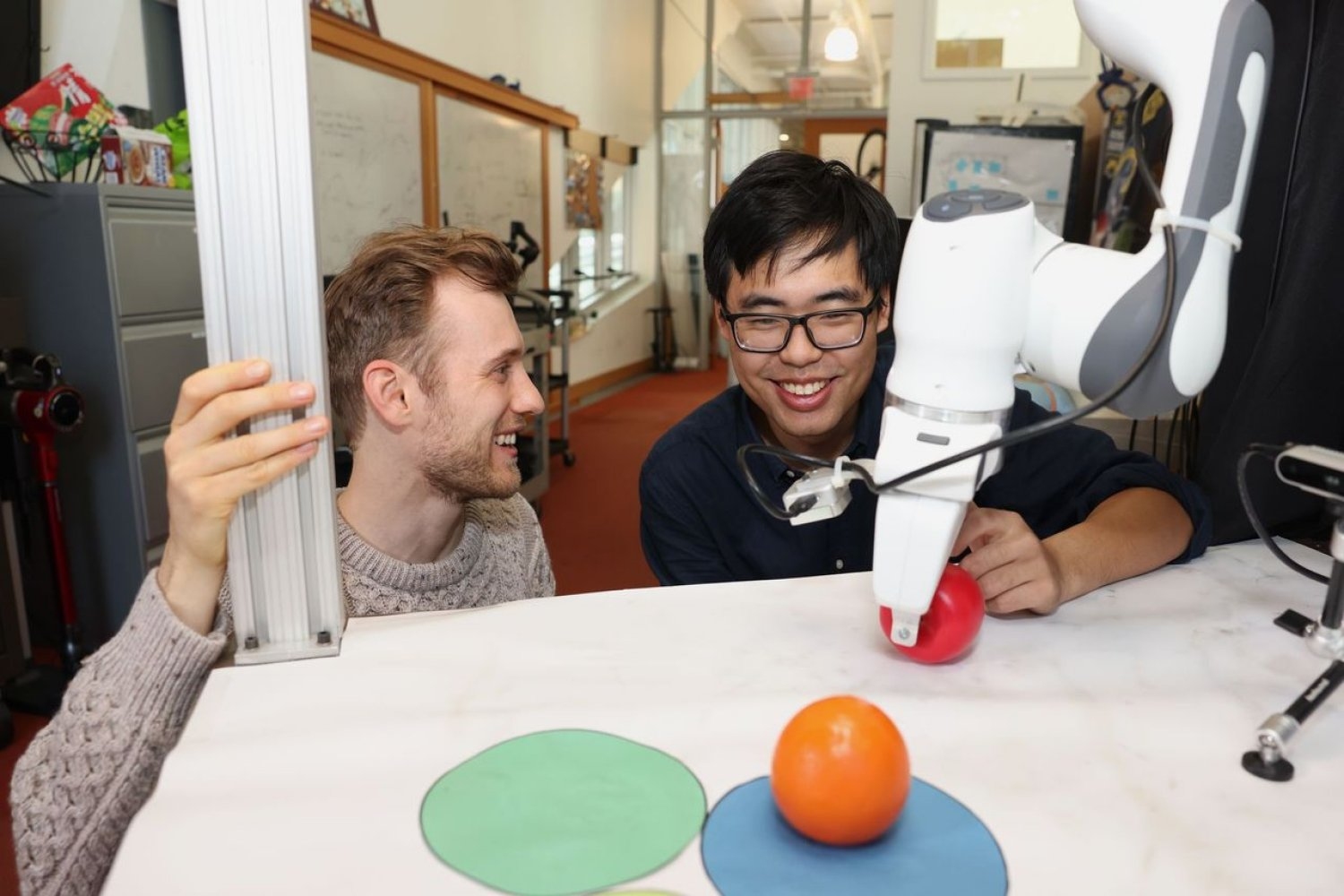
AI pareidolia: Can machines spot faces in inanimate objects?
New dataset of “illusory” faces reveals differences between human and algorithmic face detection, links to animal face recognition, and a formula predicting where people most often perceive faces.
Sept. 30, 2024 • ~8 min

/
14